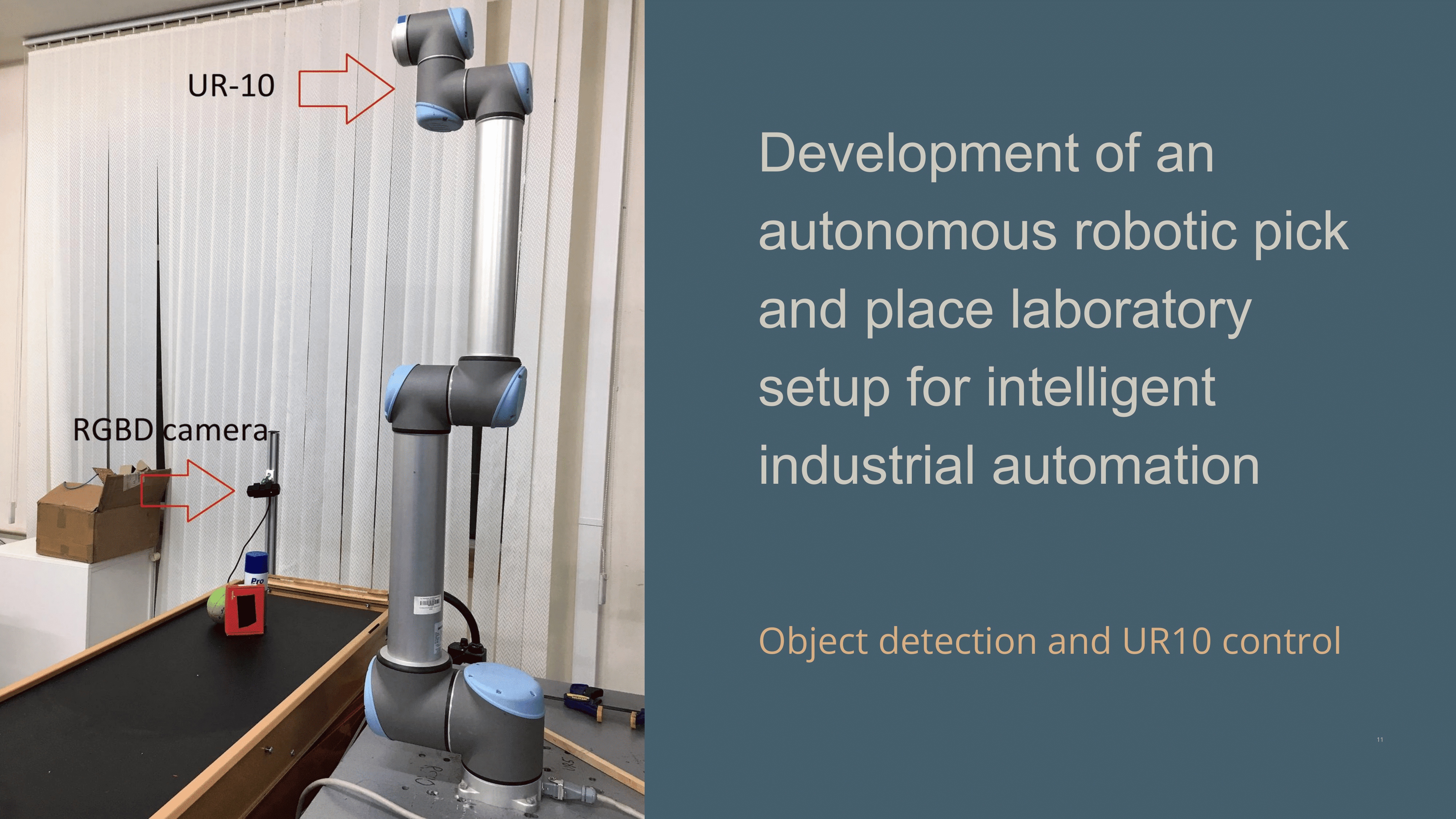
Autonomous Robotic Pick & Place System
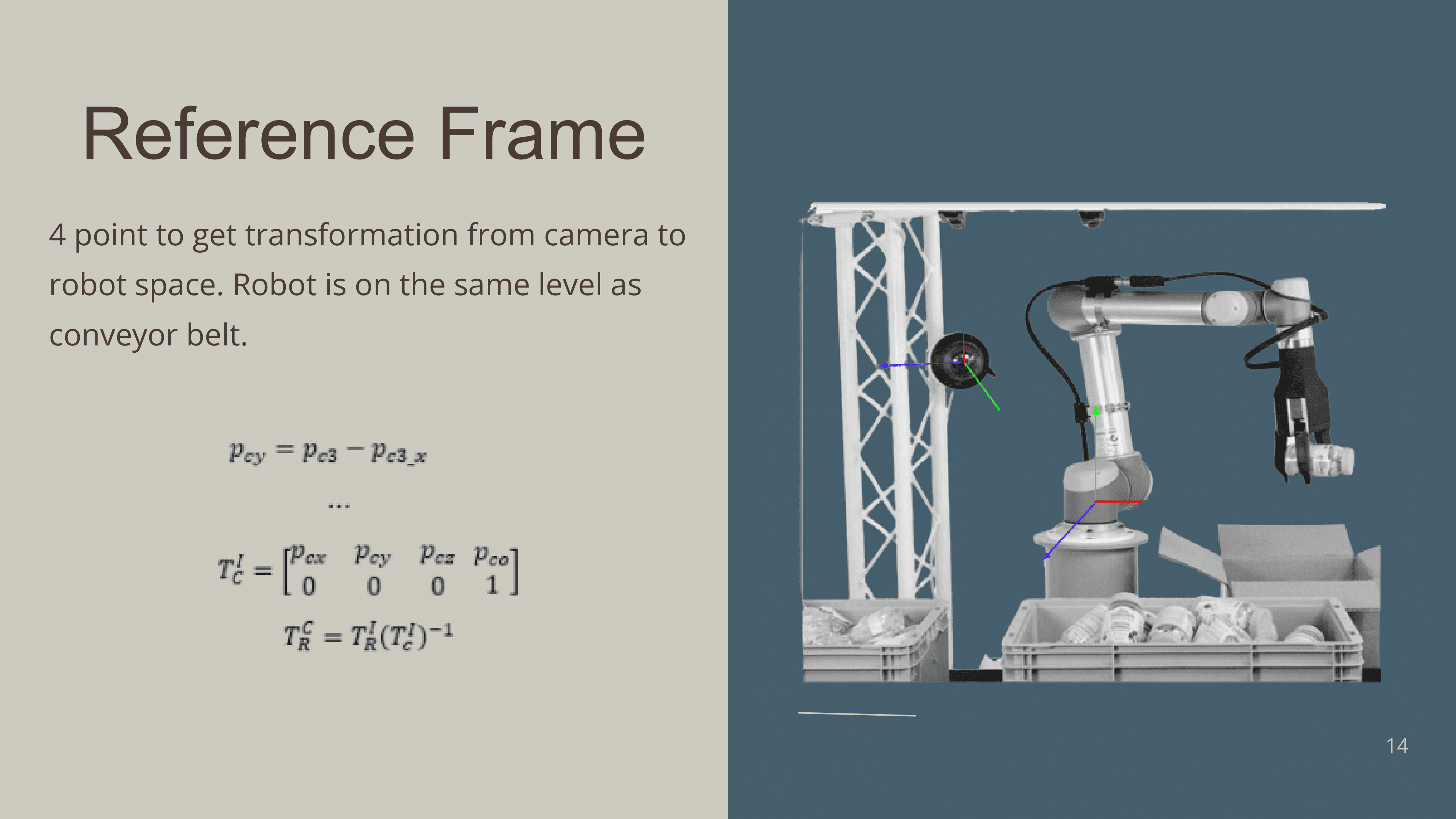
Integration of vision-based object detection with UR-10 robotic arm control. Applied point cloud processing, camera-to-robot frame transformation, and inverse kinematics using MoveIt.
Technologies: UR-10, ROS, MoveIt, OpenCV, PCL
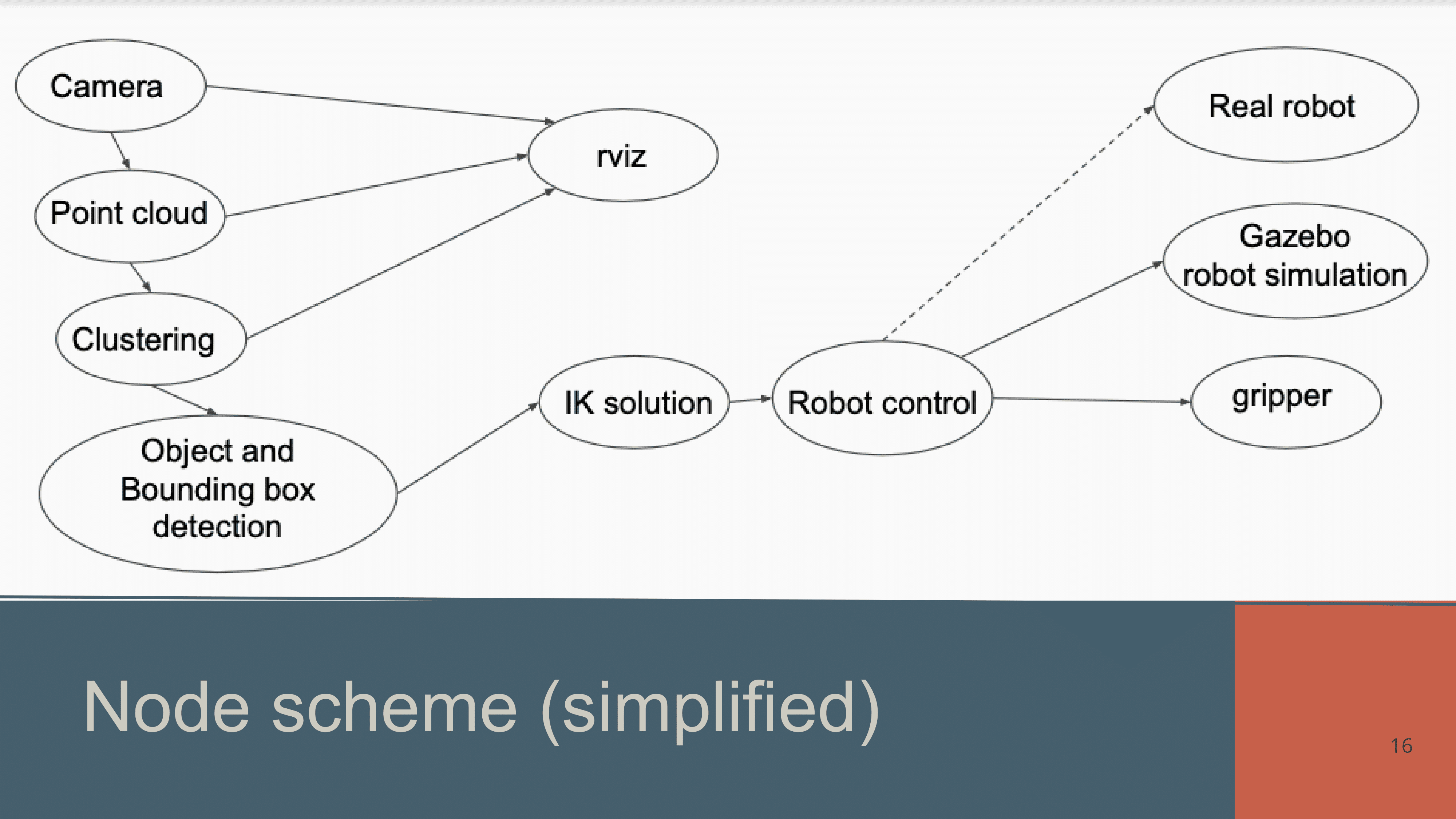
This project developed an autonomous robotic pick-and-place setup integrating vision-based object detection with UR-10 robotic arm control. Applied point cloud processing, camera-to-robot frame transformation, and inverse kinematics using MoveIt.
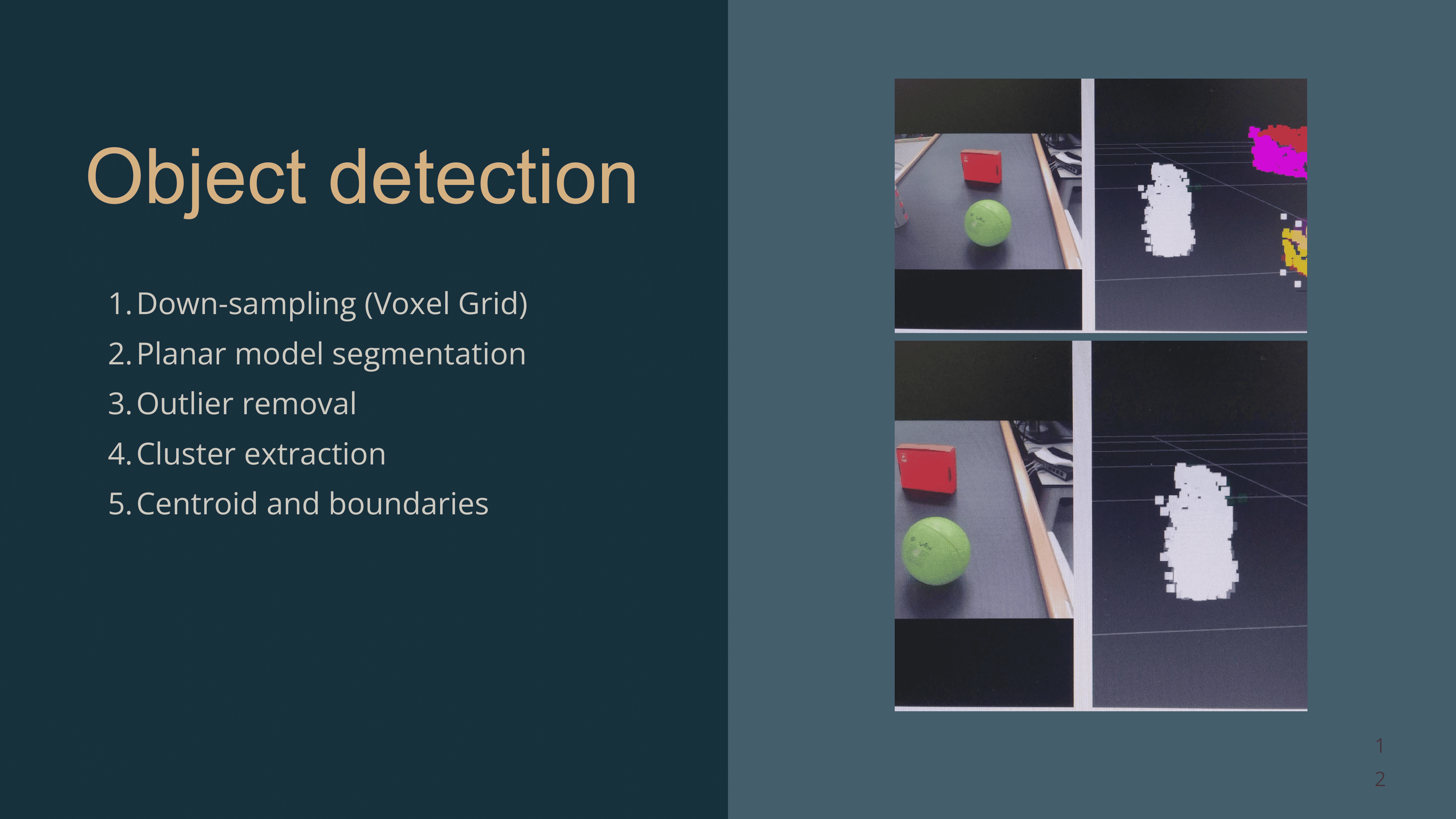
- Object detection with voxel grid filtering and cluster extraction
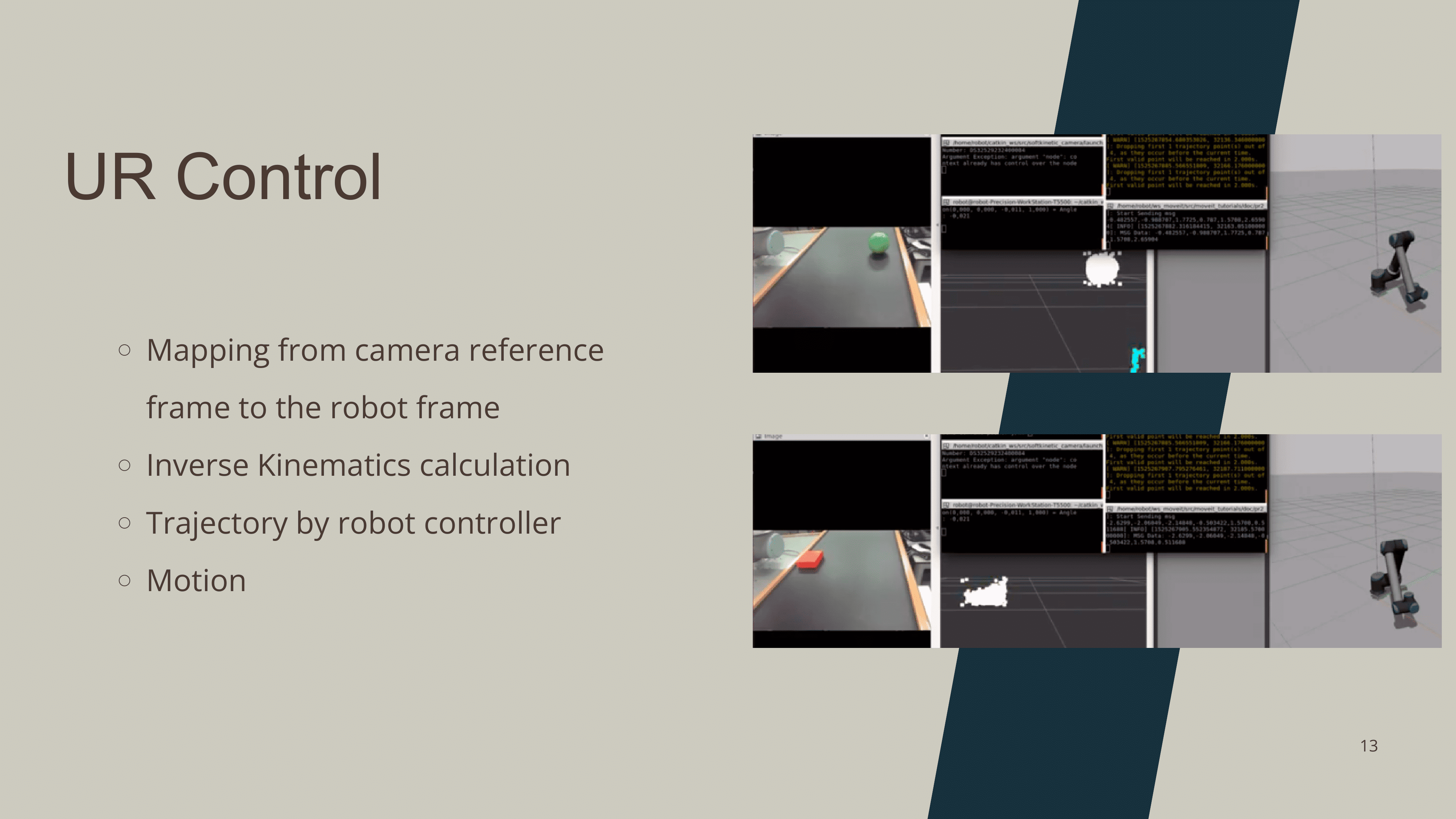
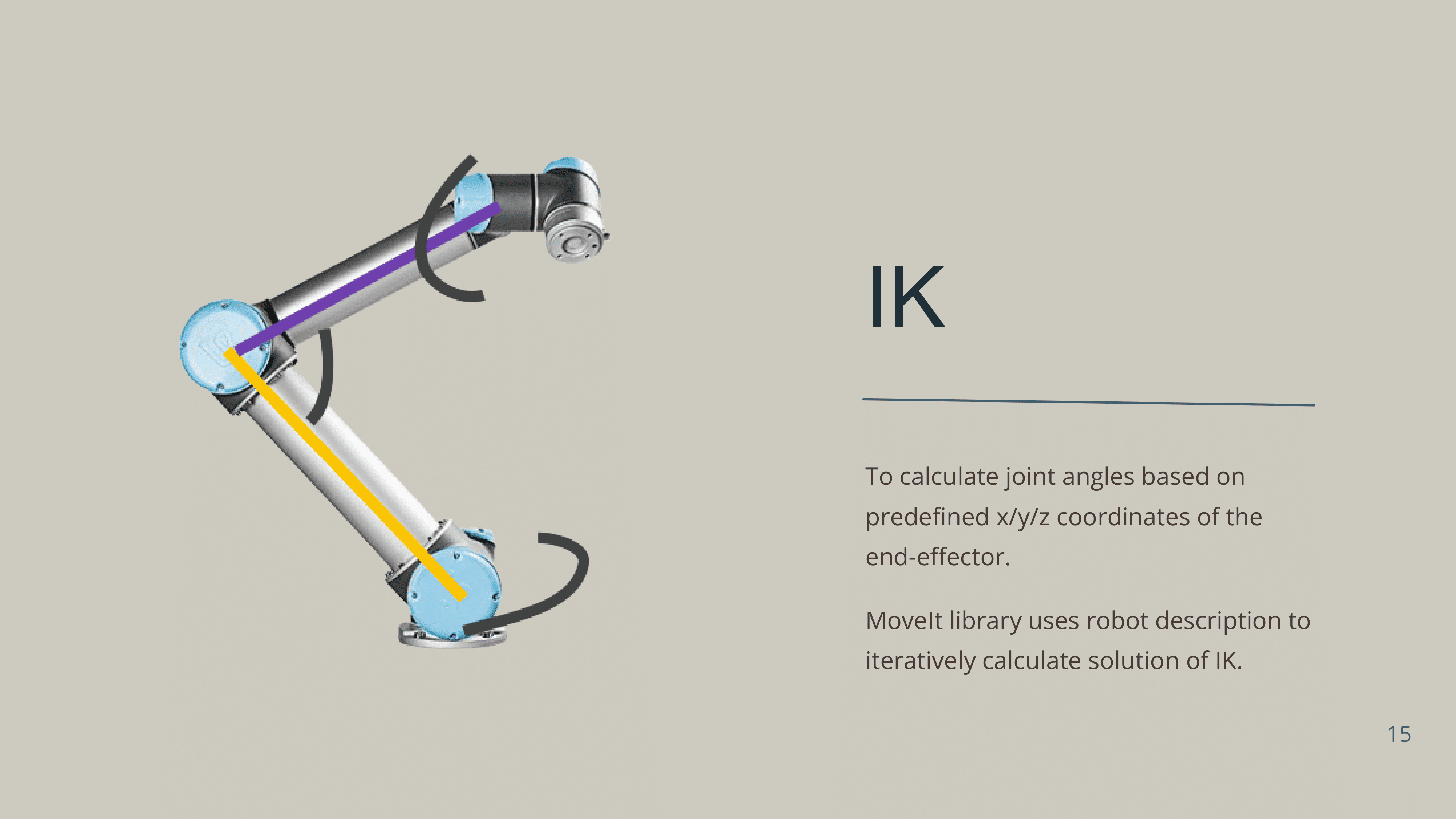
- Trajectory planning using inverse kinematics
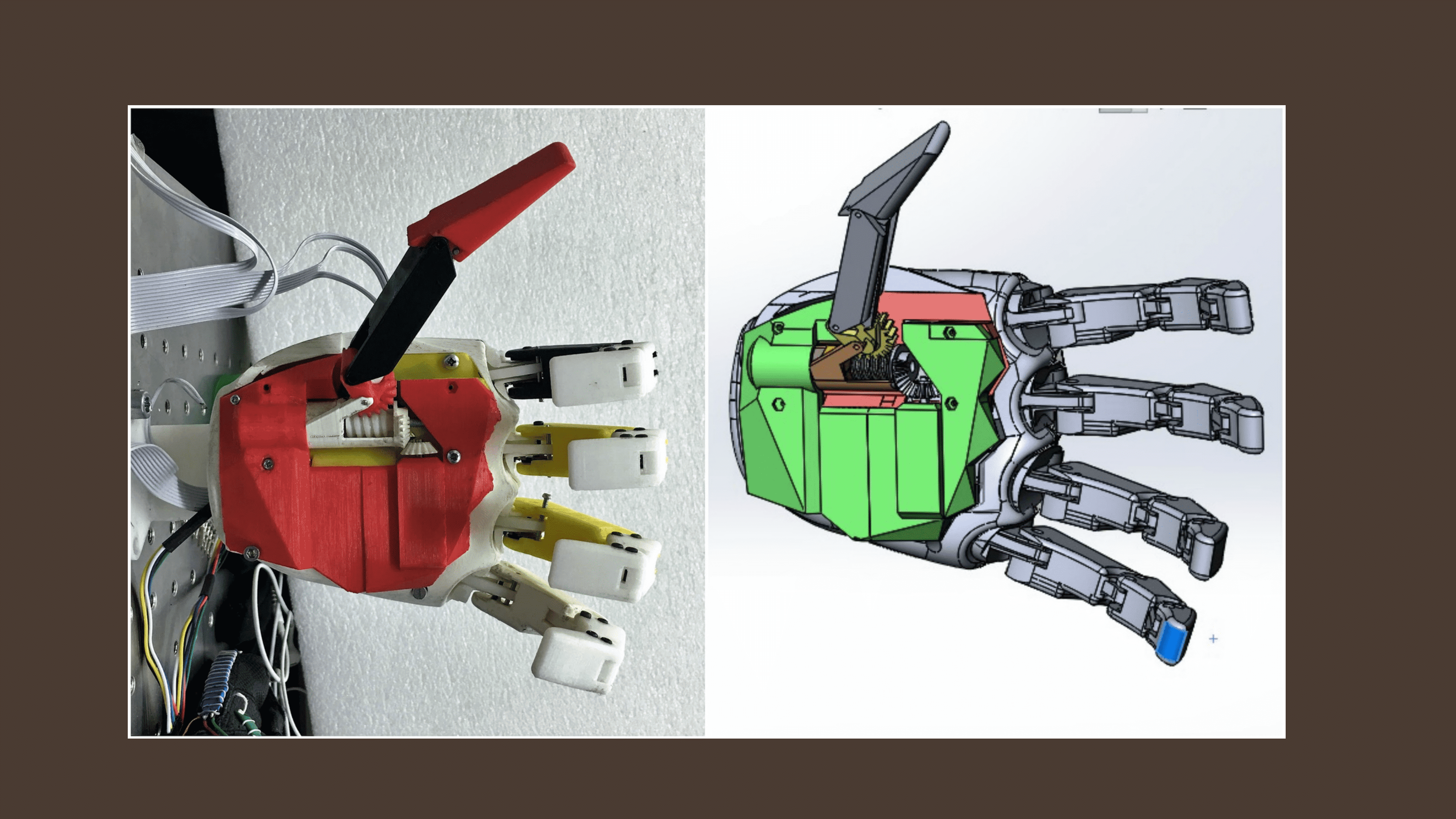
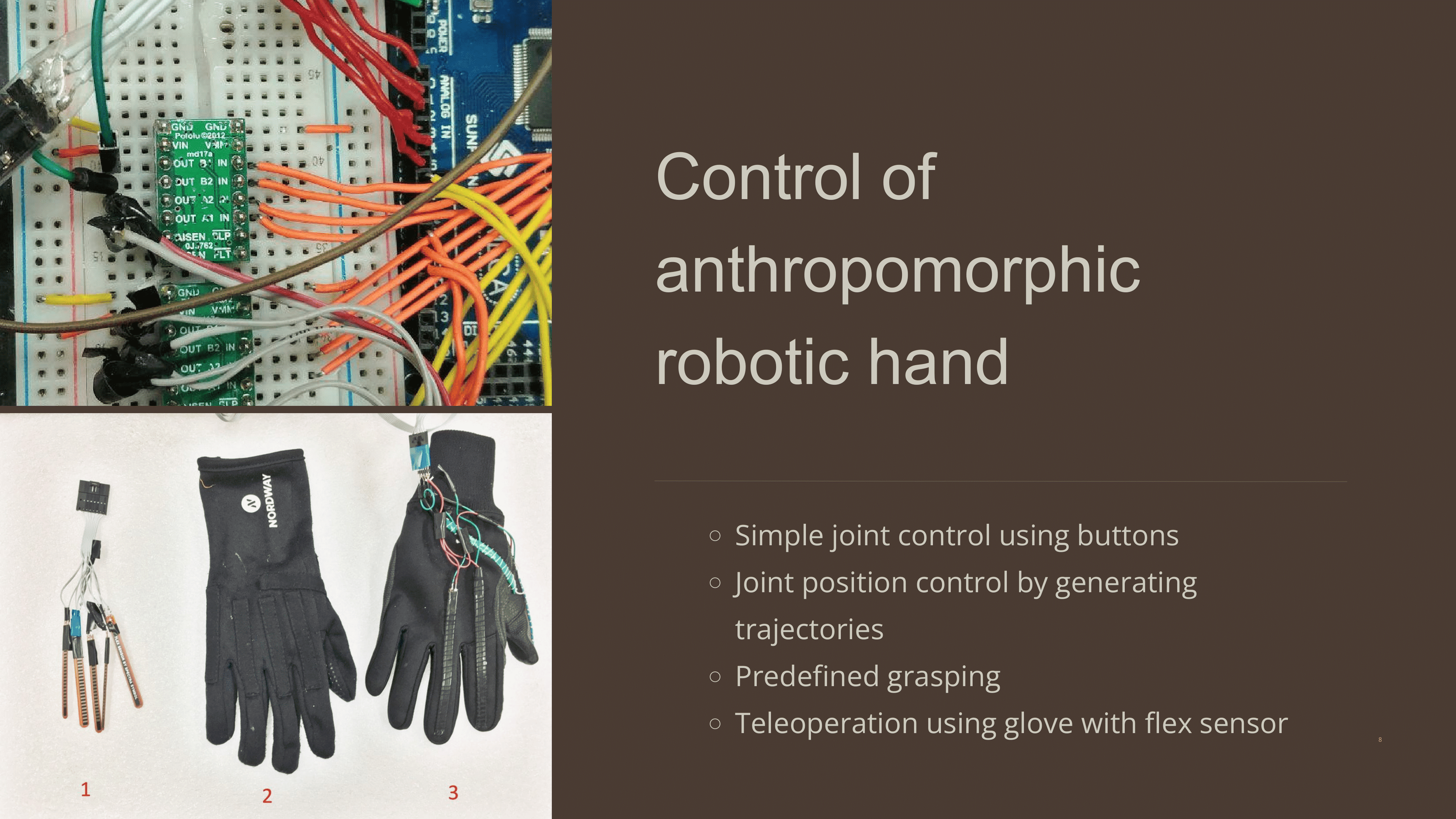
- Teleoperation of a robotic hand using flex-sensor glove
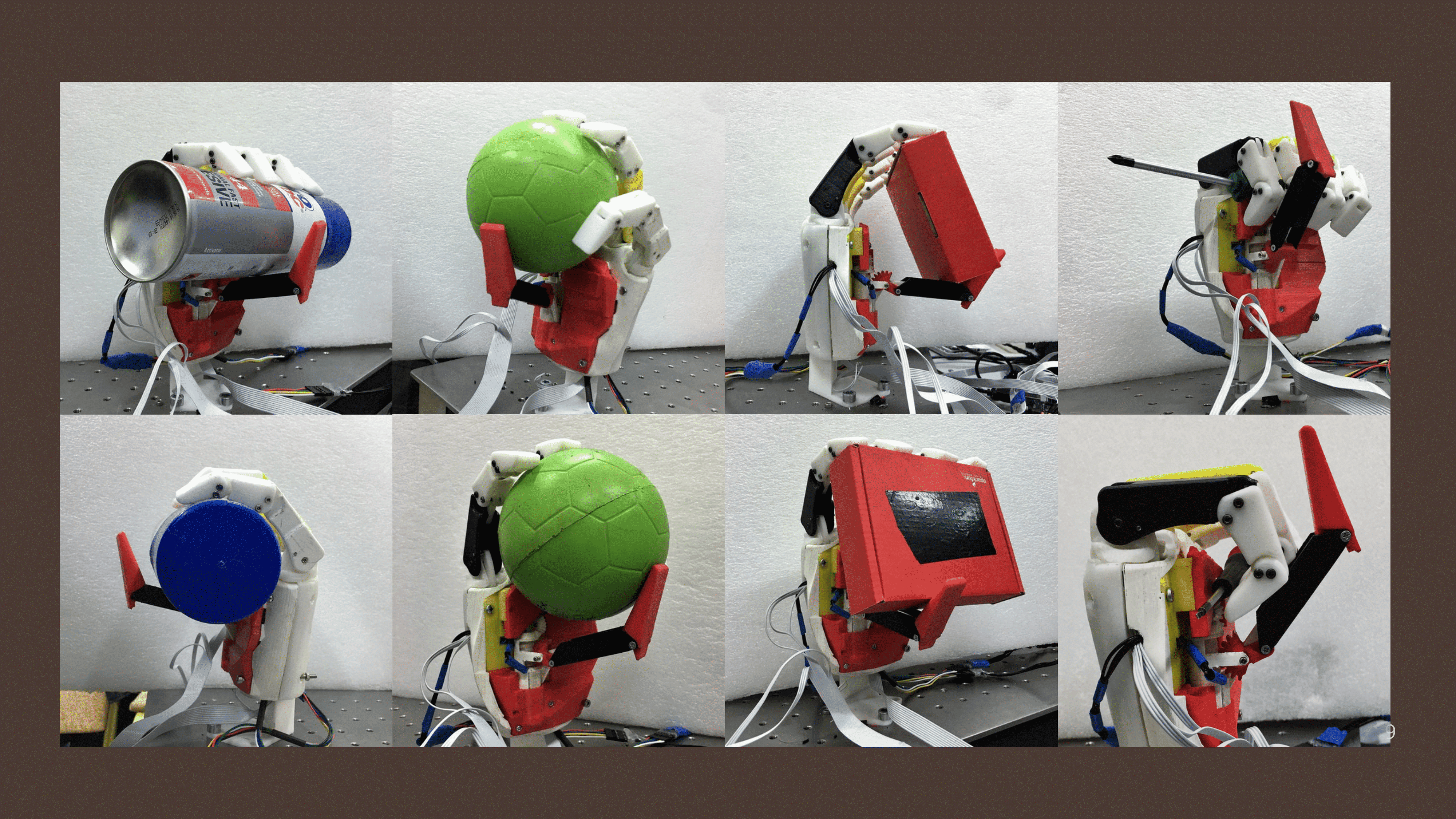
Gallery

Videos
Object Detection & UR-10 Control
Anthropomorphic Hand Teleoperation